 Videos
Videos
 Quizzes
Quizzes
 Both
Both
Gait cycle
The gait cycle describes the cyclic pattern of movement that occurs while walking. A single cycle of gait starts when the heel of one foot strikes the ground and ends when that same heel touches the ground again.
Walking requires the healthy functioning of several body systems including the musculoskeletal, nervous, cardiovascular and respiratory systems. These systems provide balance, mobility and stability as well as higher cognitive function and executive control. A loss of healthy gait function can lead to falls, injuries, loss of movement and personal freedom, and a significantly reduced quality of life.
This article will discuss the anatomy, function and commonly used terminology of the gait cycle.
| Gait cycle | Starts when the heel of one foot strikes the ground and ends when that same heel touches the ground again |
| Stance phase |
Definition: The period of gait from heel strike through to toe-off. Subphases: heel strike, foot flat, midstance, heel-off, toe-off. |
| Swing phase |
Definition: The period of gait from toe-off through to heel strike. Subphases: early swing, mid swing, late swing |
| Common abnormal gait patterns | Antalgic, arthrogenic, ataxic, contracture, hemiplegic, diplegic, Parkinsonian, Trendelenburg, steppage, equinus, short leg |
- Definition
- Phases of gait
- Joint motion and muscle activity during gait
- Gait analysis
- Gait pattern
- Clinical relations
- Sources
Definition
Gait is the action of walking (locomotion). It is a complex, whole-body movement, that requires the coordinated action of many joints and muscles of our musculoskeletal system. It mostly includes the movements of the lower limbs, upper limbs, pelvis and spine.
Gait also depends on the proper functioning of other body systems such as nervous, cardiovascular and respiratory system.
Phases of gait
The two main phases of gait include:
- The stance phase
- The swing phase
Each of these phases has subphases that are going to be described in detail in the following text.
Stance phase
The stance phase is the period of the gait cycle when the foot is on the ground and bearing body weight. More specifically, it can be described as the period between the moment that the heel of the foot touches the ground (heel strike) until the moment that the toe-off occurs.
The stance phase consists of five subphases;
- The heel strike (initial response, contact response, or weight acceptance). In this subphase, the heel of the foot makes initial contact with the ground. It requires the body’s weight to be accepted by the leg making contact with the ground.
- The foot flat (loading response) is the second subphase when the foot rolls forward until the entire plantar surface is in contact with the ground.
- The midstance starts when the weight of the body is propelled forward, directly over the lower extremity, so that the greater trochanter of femur is directly above the middle of the foot. At this stage, our entire body weight is being balanced over one leg.
- The next substage is heel-off and includes lifting the heel off the ground. This is when we start to shift the body weight onto the contralateral leg.
- The toe-off is the final stage of the stance phase and includes pushing the toes into the ground while the ankle plantarflexes, creating forward propulsion.
Swing phase
The swing phase is the second phase of gait when the foot is free to move forward. It is described as the period between toe-off and heel strike.
There are three subphases of the swing phase:
- The early swing (acceleration phase) is the first sub-phase during which the foot is lifted from the ground. The ankle dorsiflexes and the knee flexes so that the foot and toes can be moved from the ground. The hip flexes to bring the leg forward, moving it directly under the body.
- The mid-swing phase is the second phase when the non-weight-bearing leg passes directly beneath the body and past the weight-bearing leg. At the same time, the trunk is moved forward so that the weight of the body is directly over the weight-bearing leg.
- The late swing (deceleration phase) is the last subphase. The foot is moved to a position in front of the body, the knee extends and momentum decelerates. The lower limb is now ready for heel strike and prepares to accept the transfer of body weight, for the start of the next stance phase.
As the legs move, so does the rest of the body. The pelvis rotates forward along with the swing leg, while at the same time the thorax and spine rotate in the opposite direction to maintain balance. The contralateral arm assists balance and propulsion, by swinging forward at the same time as the opposite leg.
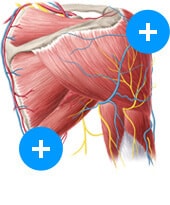
Joint motion and muscle activity during gait
Gait is a multi-joint, multi-organ activity. Muscle contraction and joint mobility are considered to be key elements in the functioning of gait. Muscles may contract concentrically (muscles shorten, creating movement and acceleration), eccentrically (controlled muscle lengthening, creating deceleration) or isometrically (muscle contracts without shortening or lengthening, creating stability).
Here, we provide a simple overview of the actions occurring in the joints of the lower limb during the gait cycle.
Hip joint
The hip joint flexes during the swing phase and extends during the stance phase of gait. Hip flexion is created by the hip flexor muscles to produce the forward swing movement of the lower extremity. This action is performed predominantly by the iliopsoas muscle. This movement is facilitated by the eccentric contraction of the hamstring muscles (biceps femoris, semimembranosus, semitendinosus). Hip extensor muscles (gluteus maximus and the hamstring muscles) act to stabilize the pelvis during shock absorption and to control the forward momentum of the body as the weight is shifted forward over the stance leg. Hip abductor muscles, mainly gluteus medius and gluteus minimus act to stabilize the pelvis, preventing pelvic dropping on the side of the free leg. The hip adductor muscles control the balance in the weight-bearing leg.
Knee joint
The knee is held in a stable extended position as the foot makes contact with the ground during heel strike by concentric contraction of the quadriceps muscle group and eccentric contraction of the hamstring muscles. The knee remains (predominantly) extended throughout the stance phase to allow for stable weight-bearing by the lower limb. However, a small “flexion wave” movement is seen within the knee as the lower limb absorbs shock in contact with the ground. The swing phase sees the knee move from extension into flexion, then back to extension. This fluid action is due to the joint action of both the knee flexor muscles and the knee extensor muscles to ensure controlled acceleration and deceleration of the leg.
Foot and ankle
The ankle is dorsiflexed as the foot swings through to make contact with the ground at heel strike. Then immediate plantarflexion occurs, controlled by eccentric contraction of the ankle dorsiflexor muscles (tibialis anterior, extensor digitorum longus, extensor hallucis longus, fibularis tertius), as the foot rolls forward into the foot flat position. Forceful plantarflexion then occurs, by the action of the gastrocnemius and soleus muscles, creating propulsion during heel-off and toe-off stages.
Gait analysis
Gait analysis is a way of assessing human motion. Gait can be analyzed using observational or instrumented techniques. The observational analysis is a less objective assessment by which an observer uses visual observation to analyze gait and hypothesize whether gait movement varies from the norm. In instrumental analysis sophisticated equipment such as computerized motion analysis equipment, force platforms, stroboscopic photography, cinematography, electro-goniometers and electromyography are used to assess spatial, time and temporal variables. These variables include the limb movement and positions, joint angles, trajectories, velocities, generated force and muscle activity of particular body segments during the various phases of the gait cycle. Kinematic and biomechanical equations can be calculated to determine variations from known norms.
Gait pattern
The gait pattern describes the gait characteristics of each individual. These characteristics can depend on a number of individual variables such as age, height, weight, sex, walking speed, strength, flexibility and aerobic conditioning. The gait patterns can be assessed by conducting a gait analysis.
The alterations in normal gait can be caused by different deformities, injuries, weakness, disease, or pain in any part of the body. For example, a loss of dorsiflexion could suggest L5 nerve root compression, peroneal nerve compression, stroke or a neurological condition such as multiple sclerosis.
:format(jpeg)/images/study_unit/main-muscles-of-lower-limb/Usje85gPNkRtur4sugIQ_Muscles_of_lower_extremity.png)
Clinical relations
Gait disorders
Gait disorders often show up as altered distance and time variables. Decreased speed and decreased stride length may indicate bilateral limb involvement, whilst abnormal swing-stance ratios could suggest problems in a single limb. Age, fatigue, pain, musculoskeletal injury and certain neurological disorders can all decrease step and stride lengths. Here we present some of the more common pathological gaits.
Antalgic gait
An antalgic (painful) gait is often seen as a result of injury to the lower extremity. The altered gait patterns include the shorter stance phase for injured limb and the shorter swing phase for un-injured limb. In addition, there is a decreased walking velocity and decreased cadence.
These features are more commonly known as “limping”.
Arthrogenic gait
An arthrogenic gait is seen due to abnormal joint motion, which may or may not be accompanied by pain. For example, in the case of knee stiffness, the person may not be able to flex the knee enough to clear the toes from the ground.
Ataxic gait
The ataxic gait is typically caused by cerebellar dysfunction. It is characterized by wide step width and jerky, irregular, uncoordinated movements. The movements may appear exaggerated and the person may appear to lurch or stagger.
Hemiplegic or hemiparetic gait
This gait pattern is described as unilateral weakness on the affected side with weakness in flexion and dorsiflexion. This causes the person to swing the paraplegic leg outwards and in a circular motion in order to bring the leg forward. The affected upper limb is flexed, adducted, internally rotated and placed against or across the trunk as a way of improving balance. Commonly seen in stroke patients.
Parkinsonian gait
Parkinsonian gait is characterized by the flexion rigidity of the major joints (hips, shoulders, knees) and bradykinesia (short rapid steps). This type of gait can be seen in neurological conditions that affect the basal ganglia.
Trendelenburg gait
Trendelenburg sign is when, whilst standing on one leg, the free side of the pelvis drops towards the floor. This is caused by weakness of the gluteus medius and minimus muscle of the contralateral, stance leg. A similar pelvic drop may be seen during walking, causing excessive hip swing or wobbling, known as the Trendelenburg gait.
Foot drop (steppage) gait
Steppage gait is a neuropathic gait where weak or paralyzed dorsiflexor muscles prevent the person from dorsiflexing the talocrural joint in the early swing phase. Thus, the toes may point towards the ground, or may not clear the ground, during walking. To counter this the person typically compensates with increased knee flexion and a high step to try to clear the foot from the ground. Reasons for foot drop gait may include, amyotrophic lateral sclerosis, lower motor neuron lesions, cauda equina, L5 nerve root compression or peripheral neuropathies.
Equinus (toe walking) gait
This type of gait is usually observed in children with clubfoot deformity (equinovarus). In these cases, weight-bearing is predominantly performed by the dorsolateral edge or lateral edge of the foot.
Short leg gait
In this type of gait the asymmetry in leg lengths will lead to a lateral shift towards the shortened side, with pelvic tilting resulting in limping. People may try to compensate by toe walking, foot supination, or exaggerated hip flexion of the unaffected side. Causes include scoliosis, contractures, and deformity of one or more of the leg bones.
Gait cycle: want to learn more about it?
Our engaging videos, interactive quizzes, in-depth articles and HD atlas are here to get you top results faster.
What do you prefer to learn with?
“I would honestly say that Kenhub cut my study time in half.”
–
Read more.
 Kim Bengochea, Regis University, Denver
Kim Bengochea, Regis University, Denver